I opted to get out before work this morning rather than race tonight because there was wind, and it looks like there will be very little or no wind this evening.
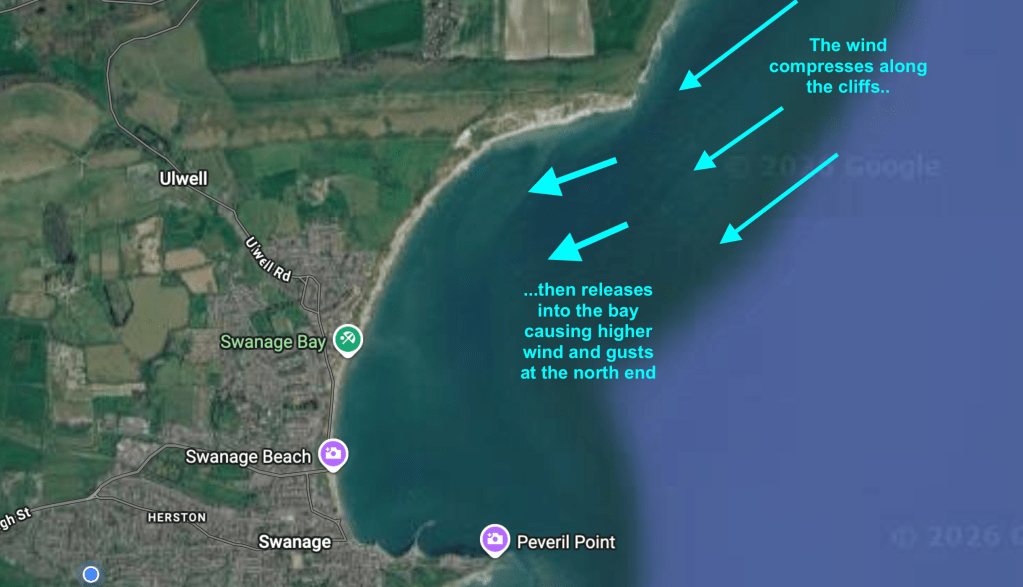
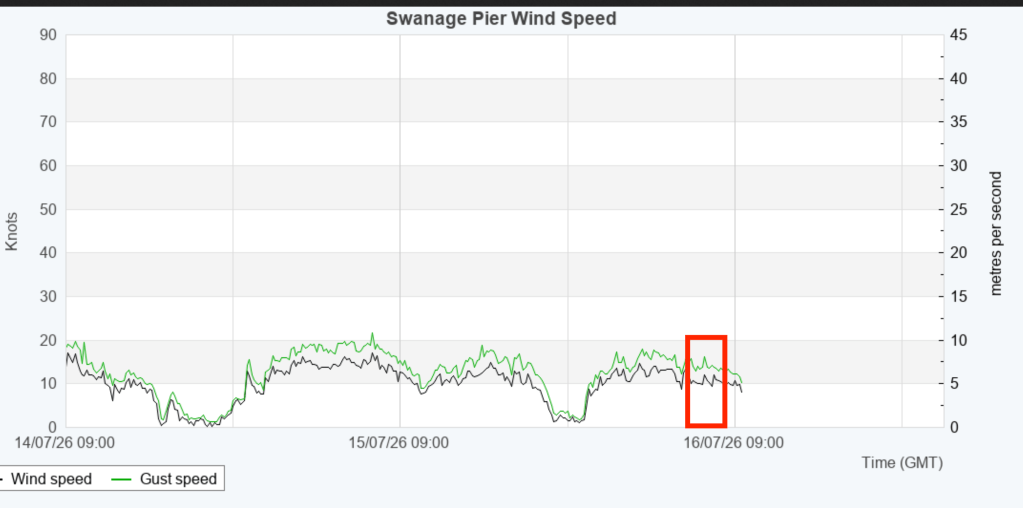
The conditions were great, it was an even 10 – 13 kts from the north east which meant there were some waves to play in, and some stronger, gustier conditions at the north end of the bay thanks to our local geography.
Session focus and observations
Today was mostly a boat-speed session, but I did a load of tacking practice, and in the biggest gusts cracked off to have some reaching and surfing fun.
Wind conditions in Swanage Bay in the Summer can be weird. Our local geography gives us offshore sea breezes which cancel out the easterlies such as we’ve had recently. There’s also this thing where the surrounding areas up the hills where I live have plenty of wind, but the bay is calm. Frustrating, especially when I see that Poole Harbour has sailable wind.
I figure over the Summer when there is no wind in the Bay, I’ll either do SUPing or windsurf nearby in Bramblebush Bay.
Continuing the curious weather theme, here are some photos of an interesting day last week. That day we had a cold sea breeze hitting damp air in the bay or near land, causing it to condense.
I’m hunting for wind to sail in before or after work currently, and was on the water at 6.30am this morning (left picture below). There was enough wind for the RS Aero 9, with hiking conditions in the gusts.
My Aero will be six this year and I can share some interesting pictures of two rudder stocks + tillers that I’ve had.
My first was damaged in the boat park and was replaced around two and a half years ago, so they have both now had about the same use.
I have a sea boat, and while both were rinsed the same after sailing, the top one was left in the boat whereas the bottom one lives at home in my office.
A striking difference.
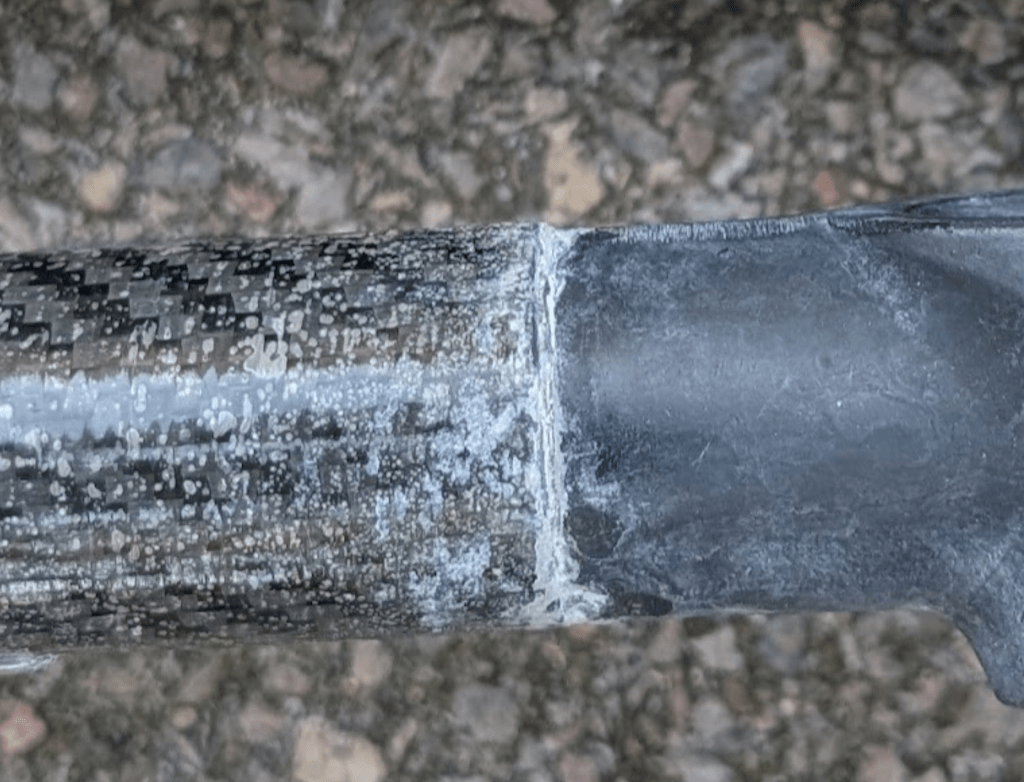
In the picture below, the top one is the home stored rudder, the bottom was boat stored. They don’t look that different at first glance, but there is more corrosion on the bottom one which also has some swelling.
Here’s a close up of old boat stored one.
In conclusion, if you can, don’t store the rudder in the boat if you sail in the sea.
Fortunately the RS Aero is pretty good for corrosion compared to an ILCA/Laser that has metal spars.
RS Aero spars are corrosion proof, and the only things that appear to corrode are the deck clam cleats, mast top clam cleat and the tiller / rudder stock.
Now that it’s light in the mornings, I can get out again before work. The wind and waves were perfect this morning, 14-17 kts, onshore from the east so I took a Laser out. (Nope, not calling it an ILCA, the sticker says Laser.)
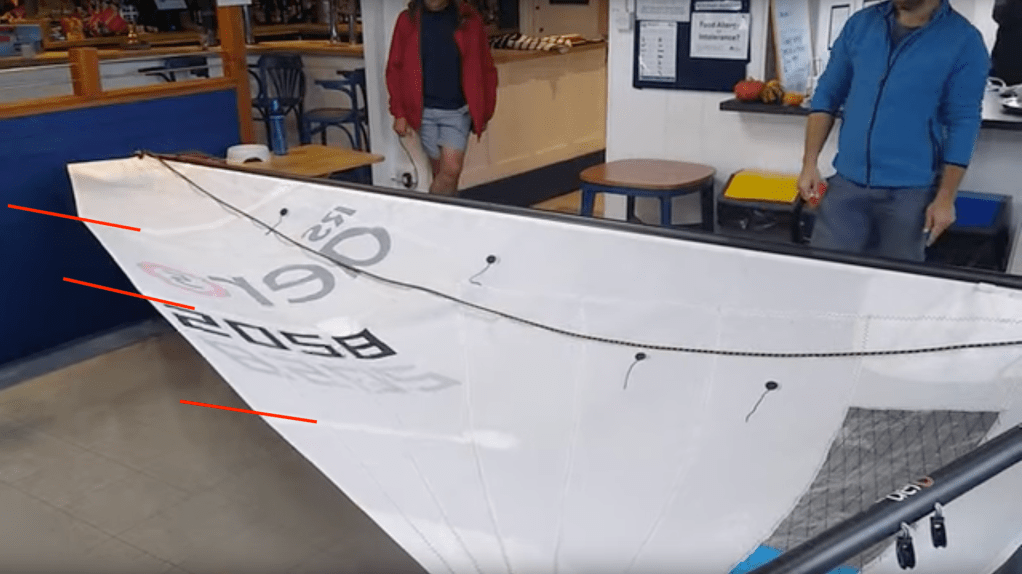
I think solo launching and recovering in waves, is pretty much the only scenario where I prefer the Laser over an RS Aero. The Laser is tougher, and if I ding it I know it’s a cheaper, easier repair. Couple that with an old training sail and I have a good boat for onshore solo conditions.
I feel I’m still getting the hang of the Laser in moderate winds and up. Today, maxed at 17 knots felt like hard work at times, and it looks like you just have to brutalise the mast and sail to depower it. I need a more powerful downhaul (6-1 currently). In fact the Laser generally feels like a brute force boat.
The Aero 7 on the other hand feels super manageable at 17knts, like we’re entering the fun zone; all the controls are in the right place, they “just work” and I know nothing is going to break. No doubt there’s a skill and experience issue here. I’ve sailed an RS Aero for five plus years but I’m a very occasional Laser sailor.
Anyway, apart from all that, I had a great sail, and put into practice everything I’ve been learning in the 2025-2026 Winter, RS Aero training weekends, especially downwind, gybing and bearing away.
Great stuff. The boat was nicely under control, I was finding waves, doing s-turns and lots of by-the-lee sailing, and using the kicker well to control power and stability, and help bearing away.
Although, sailing a Laser just makes me miss the RS Aero even more.
With the new season just around the corner, I thought I’d share some pre-season preparation tips.
1. Replace the halyard or halyard top
If you’re an active RS Aero sailor, it’s probably a good idea to get a new halyard every season, or at a minimum replace the halyard top.
When the halyard top wears, it won’t hold so well in the mast top cleat. My halyard tail has broken a couple of times over the years, each time just below the knot or splice depending which halyard type I was using.
The halyward tail broke again recently – and since it was starting to slip anyway – I tried Sammy Isaacs-Johnson’s suggestion to use the Rooster RS Aero Halyard upgrade. This works a treat, holds tight, is easy to pull through the mast top bullseye and I was able to reuse the halyard tail.
I did more training events than competition events in 2025 and it feels like things are starting to click. My race results are improving nicely too. If I had to choose the top learnings of 2025, it’d be these:
1. Keep the boat flat
Nothing new here, we all know to keep the boat flat, but doing it well and consistently really is key. Flat as in not heeling.
Doing this is relatively easy to improve as it comes down to technique and fitness, both of which can be worked on.
At last I’ve gotten round to writing this Christmas gift idea list.
For context, I’m a dinghy sailor who regularly sails an RS Aero, ILCA, and 2000, plus the usual mix of boats when instructing. I sail solo a lot in coastal waters, so everything I rely on for safety is included in this list. I also use it for SUP’ing too.
We ended up shore based both days because of the conditions for launching, but nevertheless, thanks to our two coaches Sammy Isaacs-Johnson and George Cousins, a great training group and super facilities, it was a brilliant weekend.
Training weekends like this remind me of the master classes I used to do many years ago when I was a classical musician (guitar), where ‘ah ha’ moments would have major shifts on my playing. I had a couple of those ‘ah has’ this weekend.
I joined an ILCA (Laser) training session last month in Poole. I’m an RS Aero sailor, but my daughter sails an ILCA and I fancied a go in that. I haven’t sailed an ILCA in years so felt like a real newbie at the beginning, but it started coming together during the day.
It was a great day, and I learned a lot. Thanks for the coaching James Foster. The RS Aero training season starts soon with the first weekend at the end of October. Can’t wait.